




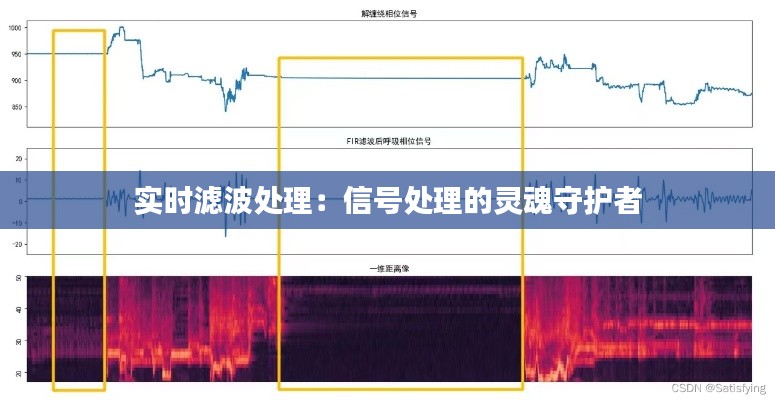
标题:实时滤波处理:信号处理的灵魂守护者
引言:信号处理中的实时滤波处理
信号处理是现代通信、生物医学、工业控制等领域不可或缺的技术。在信号处理过程中,滤波是其中一项基本且重要的操作。滤波的目的是从原始信号中去除噪声和干扰,提取有用的信息。而在实际应用中,实时滤波处理尤为重要,它要求滤波器能够快速响应信号的变化,确保信号的实时性和准确性。本文将探讨实时滤波处理的基本原理、常用算法以及在实际应用中的挑战。
实时滤波处理的基本原理
实时滤波处理的核心是滤波器的设计与实现。滤波器的基本功能是通过对信号进行加权平均,去除噪声和干扰,保留有用信号。实时滤波处理要求滤波器具备以下特点:
- 快速性:滤波器需要迅速响应信号的变化,确保信号的实时性。
- 准确性:滤波器应尽可能准确地去除噪声和干扰,保留有用信号。
- 稳定性:滤波器在处理过程中应保持稳定,避免引入新的误差。
常用实时滤波算法
实时滤波处理中,常用的滤波算法包括以下几种:
-
移动平均滤波算法:移动平均滤波算法通过对信号进行加权平均,去除噪声。该算法简单易实现,但滤波速度较慢,适用于信号变化不大的场合。
def moving_average_filter(signal, window_size): filtered_signal = [] for i in range(len(signal)): filtered_signal.append(sum(signal[max(0, i - window_size + 1):i + 1]) / window_size) return filtered_signal -
中值滤波算法:中值滤波算法通过对信号进行排序,取中间值作为滤波结果。该算法能有效去除脉冲噪声,但计算复杂度较高。
def median_filter(signal, window_size): filtered_signal = [] for i in range(len(signal)): filtered_signal.append(sorted(signal[max(0, i - window_size + 1):i + 1])[len(signal[max(0, i - window_size + 1):i + 1]) // 2]) return filtered_signal -
卡尔曼滤波算法:卡尔曼滤波算法是一种基于统计模型的滤波方法,适用于动态系统。该算法能够实时估计系统状态,并去除噪声和干扰。
def kalman_filter(signal, initial_state, transition_matrix, observation_matrix, process_noise, observation_noise): estimated_state = initial_state for i in range(len(signal)): estimated_state = transition_matrix.dot(estimated_state) + process_noise estimated_state = observation_matrix.dot(estimated_state) + observation_noise return estimated_state
实时滤波处理在实际应用中的挑战
实时滤波处理在实际应用中面临诸多挑战:
- 计算资源限制:实时滤波处理通常需要在有限的计算资源下完成,这对滤波算法的效率和实时性提出了更高的要求。
- 噪声干扰:实际信号往往受到多种噪声干扰,如何有效地去除噪声,保留有用信号是实时滤波处理的关键。
- 动态环境:实时滤波处理需要在动态环境下进行,滤波算法需要具备一定的自适应能力,以适应信号的变化。
结论
实时滤波处理是信号处理中的重要环节,它能够有效去除噪声和干扰,提取有用信号。随着技术的不断发展,实时滤波处理在各个领域的应用越来越广泛。面对挑战,我们需要不断优化滤波算法,提高滤波器的性能,以满足实际应用的需求。
转载请注明来自四川春秋旅游有限责任公司锦绣路分社,本文标题:《实时滤波处理:信号处理的灵魂守护者》
百度分享代码,如果开启HTTPS请参考李洋个人博客





 蜀ICP备17014439号-1
蜀ICP备17014439号-1